In this project, work was carried out on both path planning and object detection using more
than one neural network model.
In this way, the UAV was provided to avoidance from obstacles while in autonomous movement.
It is also planned to detect threats around it.
Our first artificial neural network is focused on depth estimation operations normally done
by binoculars or dual cameras.
However, thanks to the innovative work carried out, monocular, that is, has been trained to
produce a depth map with a single camera.
The first use of this technology used for autonomous cars in Germany for a drone was
realized with this project. In this way, with lower cost
Consistent distance measurements were obtained from the image. The second neural network
focused on the detection of objects such as weapons and knives that could be a threat.
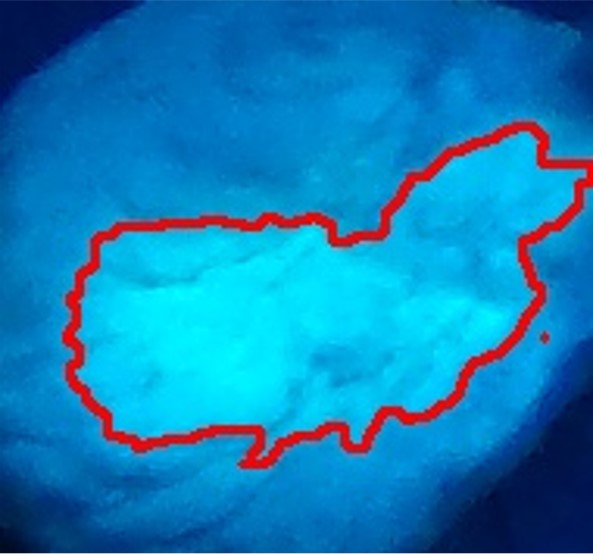
Another function is to add endemic plants to our network by adding the data used for endemic
plant determinations.
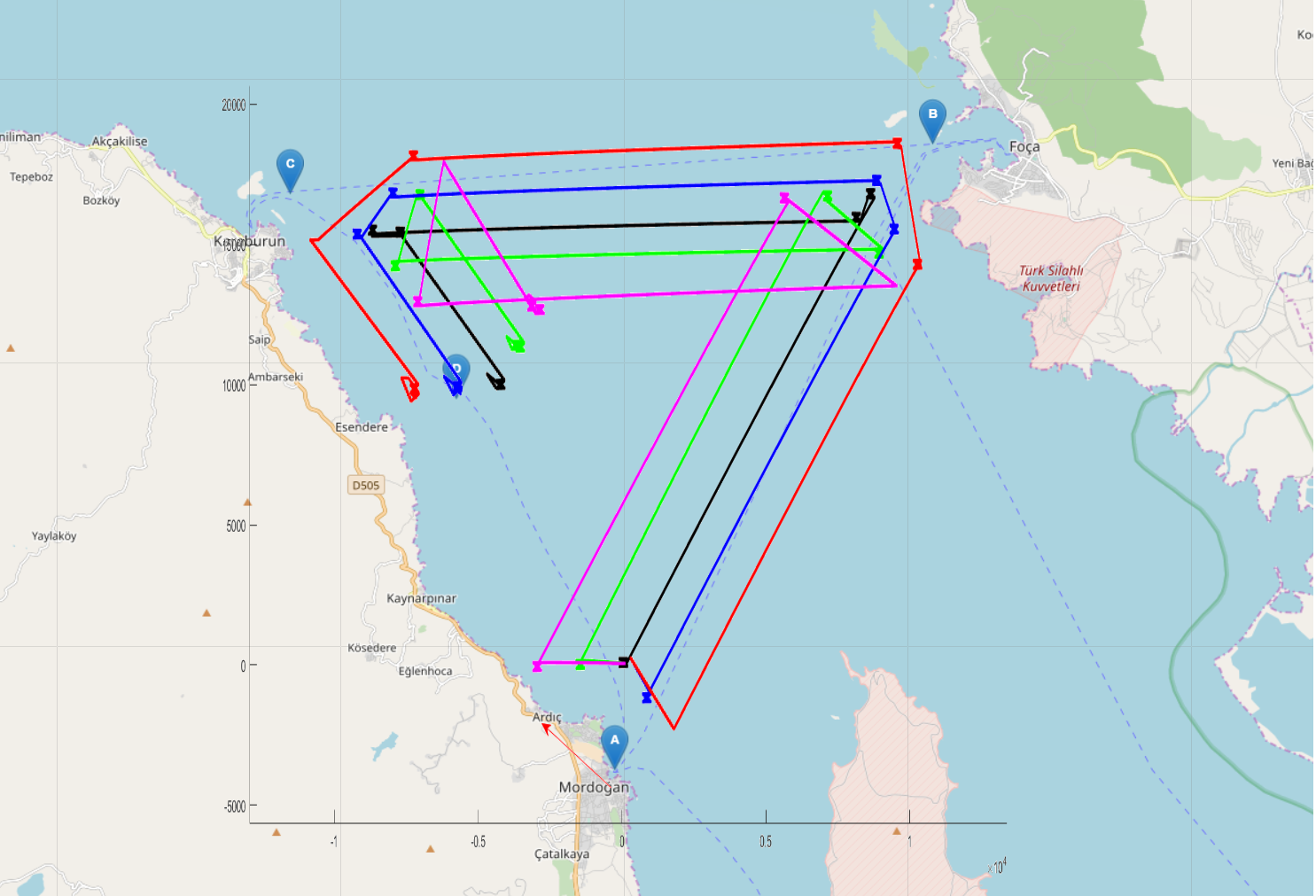
A simulation environment has been created through the game engine in order to carry out the
test stages safely and quickly.
In this simulation environment, the drone follows the previously planned route thanks to the
autopilot software we have.
On the one hand, it has managed to avoid obstacles in the artificial environment and on the
other hand it has successfully performed plant and weapon detection operations.